Method Overview
Modeling human behaviors in contextual environments has a wide range of applications in character animation, embodied AI, VR/AR, and robotics. In real-world scenarios, humans frequently interact with the environment and manipulate various objects to complete daily tasks.
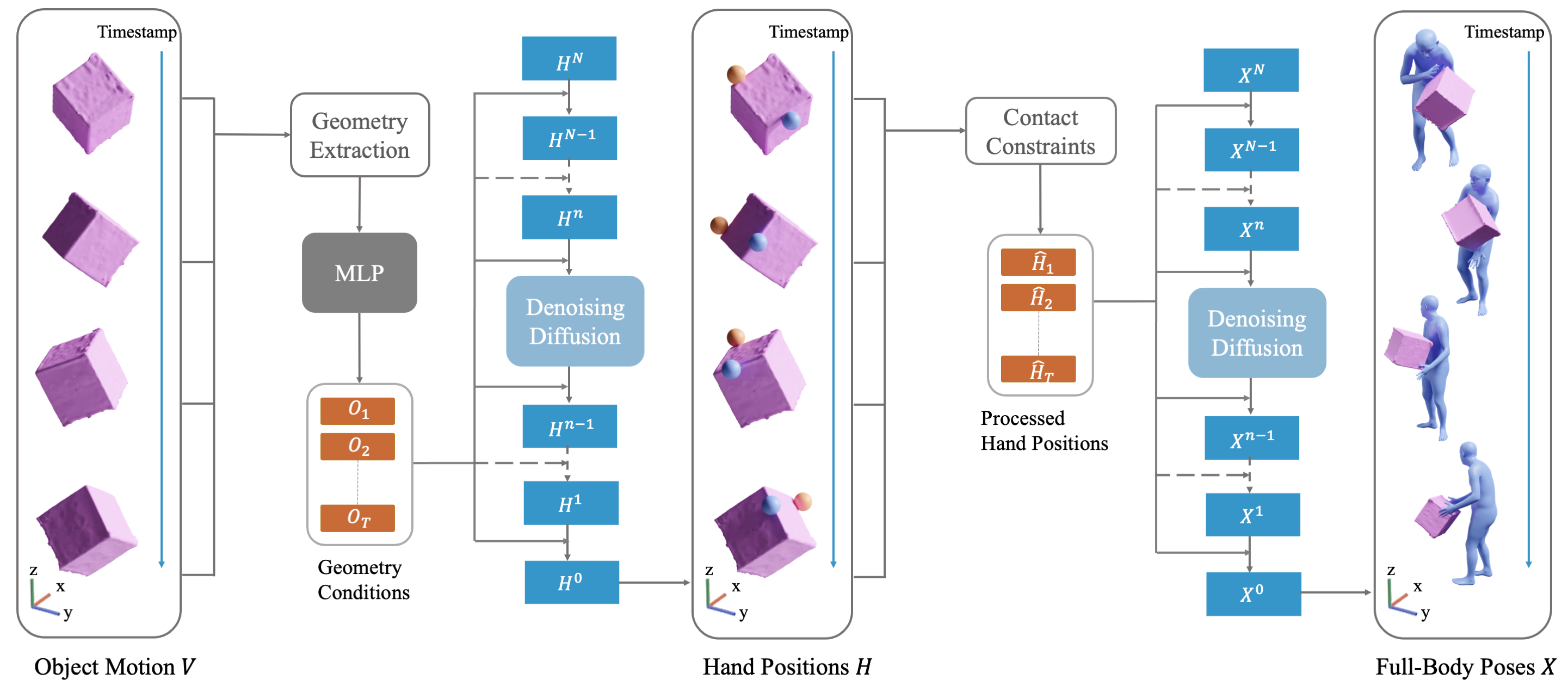
In this work, we study the problem of full-body human motion synthesis for the manipulation of large-sized objects. We propose Object MOtion guided human MOtion synthesis (OMOMO), a conditional diffusion framework that can generate full-body manipulation behaviors from only the object motion. Since naively applying diffusion models fails to precisely enforce contact constraints between the hands and the object, OMOMO learns two separate denoising processes to first predict hand positions from object motion and subsequently synthesize full-body poses based on the predicted hand positions. By employing the hand positions as an intermediate representation between the two denoising processes, we can explicitly enforce contact constraints, resulting in more physically plausible manipulation motions.
With the learned model, we develop a novel system that captures full-body human manipulation motions by simply attaching a smartphone to the object being manipulated. Through extensive experiments, we demonstrate the effectiveness of our proposed pipeline and its ability to generalize to unseen objects.
Additionally, as high-quality human-object interaction datasets are scarce, we collect a large-scale dataset consisting of 3D object geometry, object motion, and human motion. Our dataset contains human-object interaction motion for 15 objects, with a total duration of approximately 10 hours.